
БНБ
"БСЭ" (95279)
- Photogallery
- Естественные науки - Математика - Технология
- Авиация и машиностроение
- Высокие технологии
- Вычислительная техника
- Нанотехнология
- Роботехника
- Энергетика
- Электроника
Гировертикаль
Определение "Гировертикаль" в Большой Советской Энциклопедии
 |
| Гировертикаль с маятниковой коррекцией (схема) |
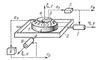 |
| Гироинерциальная вертикаль (схема) |
 |
| Гиромаятник (схема) |
При установке на корабле Гировертикаль с маятниковой коррекцией определяют углы бортовой и килевой качки, а на летательном аппарате — углы крена и тангажа. Применяются в системах автоматической стабилизации различных подвижных объектов, в успокоителях качки корабля, для стабилизации летательного аппарата и др., а также для определения искривления буровых скважин, шахт и т.п.
Другим типом Гировертикаль, не требующим применения системы коррекции, является гиромаятник, т. с. гироскоп с 3 степенями свободы, центр тяжести G которого лежит на оси ротора на некотором расстоянии l от точки опоры О (рис. 2). При отклонении оси Oz гироскопа от вертикали Oz, ось Oz под действием силы тяжести Р начинает прецессировать вокруг Oz, описывая конус с вершиной в точке О. Т. к. собственный кинетический момент гироскопа Н очень велик, то период прецессии
T = 2pH/lP (1)
(где l = OG) также велик, что делает прибор практически нечувствительным к колебаниям объекта. В реальном приборе прецессионные колебания оси Oz погашаются специальным демпфером и ось Oz гироскопа приходит в положение, близкое к вертикали. Однако чтобы прибор обладал необходимой точностью при ускоренном движении (маневрировании) объекта, период Т должен удовлетворять условию М. Шулера (быть равным периоду колебаний математического маятника, длина которого равна радиусу Земли), т. е. составлять 84,4 мин, что до сих пор практически осуществить не удалось. В реализованных конструкциях Т обычно ~ 10—20 мин, вследствие чего подобные Гировертикаль при маневрировании объекта имеют значительные погрешности. Гиромаятники применяют в секстанте для стабилизации относительно плоскости горизонта его оптические системы и в некоторых корабельных системах стабилизации, используемых преимущественно при постоянных значениях скорости и курса корабля.
Прибором, позволяющим определять с высокой степенью точности направление вертикали при ускоренном движении объекта, на котором установлен прибор, является гироинерциальная вертикаль (рис. 3). В ней, кроме гироскопов, используются акселерометры и вычислительные устройства (интеграторы), при этом осуществляется искусственное моделирование маятника с периодом, равным периоду М. Шулера. Гироинерциальная вертикаль состоит из астатического трёхстепенного гироскопа, на гирокамере 1 которого расположены акселерометры 3, 4 (в реальных схемах акселерометры устанавливают на гиростабилизированной платформе). Измеряемые акселерометрами кажущиеся ускорения ax и ay объекта вдоль горизонтальных осей Ох и Оу поступают в интеграторы 5, 6; их выходные сигналы (скорости vE и vN вдоль осей Ох и Оу) вводятся на датчики моментов 7, 8, прикладывающие к гироскопу моменты коррекции, которые вызывают прецессию оси гироскопа Oz к вертикали. При соответствующем выборе коэффициенты пропорциональности между сигналом с интегратора и величиной момента коррекции период прецессии оказывается равным периоду Шулера. Благодаря этому устройство обладает высокой точностью при маневрировании объекта и его погрешности не превосходят несколько угловых минут. Гироинерциальные вертикали широко используются в инерциальных навигационных системах, устанавливаемых на кораблях и летательных аппаратах.
А. Ю. Ишлинский, С. С. Ривкин.
| "БСЭ" >> "Г" >> "ГИ" >> "ГИР" |
Статья про "Гировертикаль" в Большой Советской Энциклопедии была прочитана 637 раз
| Пицца в сковороде |
| Куриный суп |
TOP 20
- Лемке Михаил Константинович
- Сульфгидрильные группы
- «Казарменный коммунизм»
- Глициния
- Японское море
- Периодическая система элементов
- Башкирская Автономная Советская Социалистическая Республика
- Иммунитет (историч.)
- Андаманское море
- Сенсуализм
- «Сообразительный»
- Звёздная астрономия
- Балкано-кавказская раса
- Ямполь (пос. гор. типа в Донецкой обл.)
- Навигация (морск.)
- Кульчицкая Елена Львовна
- Мандельштама - Бриллюэна рассеяние
- Театральные учебные заведения
- Электрическая постоянная
- Энсор Джеймс